2015 Help me understand this report
Experimental Validation of a Mechanistic Multibody Model of a Vertical Piano Action
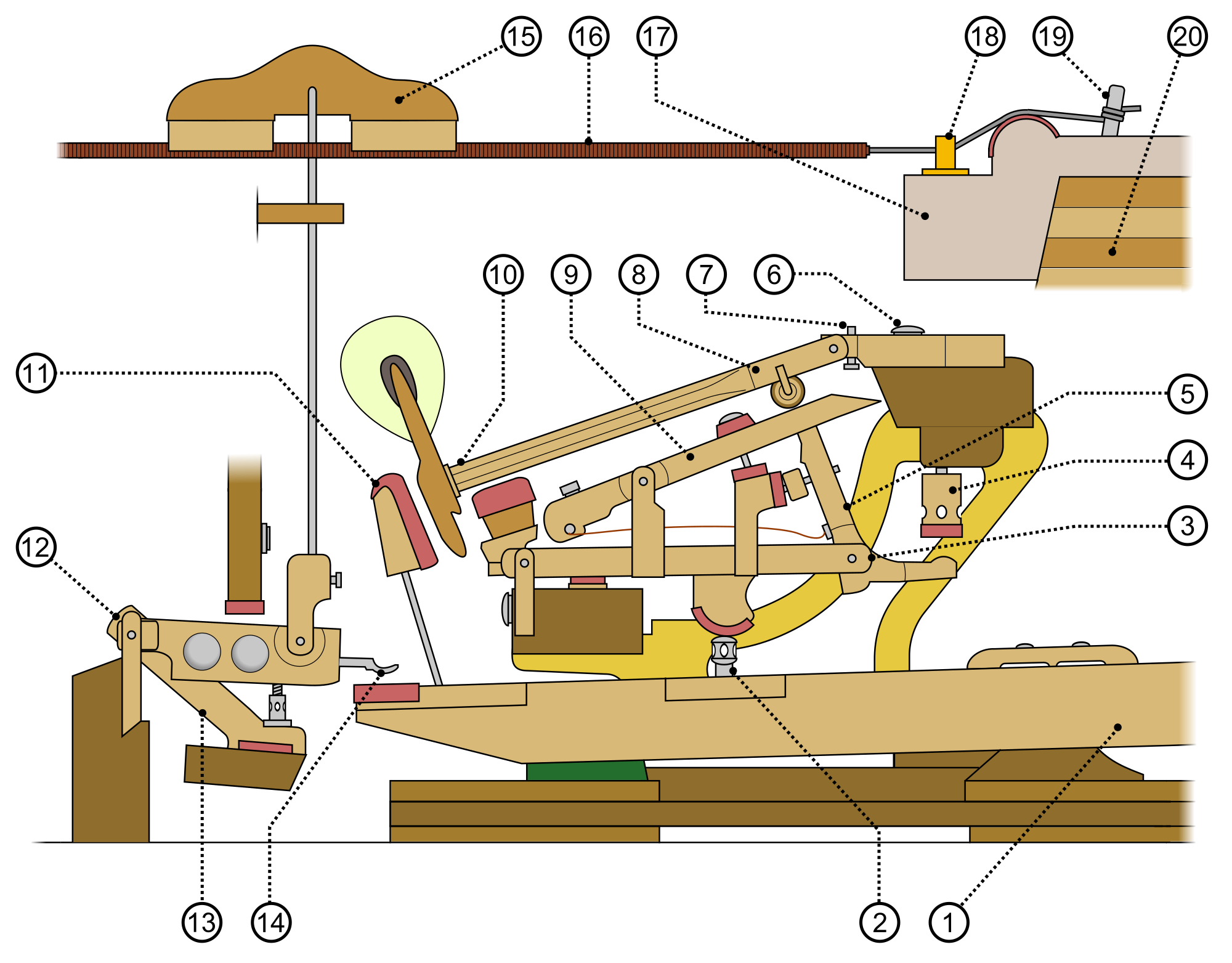
Abstract: The validity and accuracy of a high-fidelity mechanistic multibody model of a vertical piano action mechanism is examined experimentally and through simulation. An overview of the theoretical and computational framework of this previously presented model is given first. A dynamically realistic benchtop prototype mechanism was constructed and driven by a mechanical actuator pressing the key. For simulations, a parameterization based on geometric and dynamic component properties and configuration is used; initia…
Search citation statements
Paper Sections
Select...
3
2
Citation Types
1
8
0
Year Published
2015
2024
Publication Types
Select...
4
Relationship
1
3
Authors
Journals
Cited by 4 publications
(9 citation statements)
References 8 publications
1
8
0
“…Since the micromechanical contact model represents the real hysteresis curves corresponding to hammer-string contact point, the results are very similar to the ones presented in Ref. [20] which is based on a math-based contact model, i.e. curve-fitting to the experimental felt compression data.…”
Section: Simulation Results and Experimental Validationsupporting
confidence: 69%
“…Since the micromechanical contact model represents the real hysteresis curves corresponding to hammer-string contact point, the results are very similar to the ones presented in Ref. [20] which is based on a math-based contact model, i.e. curve-fitting to the experimental felt compression data.…”
Section: Simulation Results and Experimental Validationsupporting
confidence: 69%
“…the math-based model presented in Ref. [20] and the physics-based model proposed in this work, are shown in Figs. 13 and 14 for piano and forte inputs, respectively.…”
Section: Simulation Results and Experimental Validationmentioning
confidence: 99%
{kind=link}
scite is a Brooklyn-based organization that helps researchers better discover and understand research articles through Smart Citations–citations that display the context of the citation and describe whether the article provides supporting or contrasting evidence. scite is used by students and researchers from around the world and is funded in part by the National Science Foundation and the National Institute on Drug Abuse of the National Institutes of Health.
Copyright © 2024 scite LLC. All rights reserved.
Made with 💙 for researchers